%%html
<!--Script block to left align Markdown Tables-->
<style>
table {margin-left: 0 !important;}
</style>
# Preamble script block to identify host, user, and kernel
import sys
! hostname
! whoami
print(sys.executable)
print(sys.version)
print(sys.version_info)
Lesson 23 - From Regression To Classification¶
Prediction Machine¶
Imagine a basic machine that takes a question, does some “thinking” and pushes out an answer. Just like the example above with ourselves taking input through our eyes, using our brains to analyse the scene, and coming to the conclusion about what objects are in that scene. Here’s what this looks like:
Computers don’t really think, they’re just glorified calculators remember, so let’s use more appropriate words to describe what’s going on:
A computer takes some input, does some calculation and pops out an output. The following illustrates this. An input of “3 x 4” is processed, perhaps by turning multiplication into an easier set of additions, and the output answer “12” poops out.
Not particularly impressive - we could even write a function!
def threeByfour():
value = 3.0 * 4.0
return(value)
print('3 times 4 =',threeByfour())
Next, Imagine a machine that converts kilometres to miles, like the following:
But imagine we don’t know the formula for converting between kilometres and miles. All we know is the the relationship between the two is linear. That means if we double the number in miles, the same distance in kilometres is also doubled.
This linear relationship between kilometres and miles gives us a clue about that mysterious calculation it needs to be of the form “miles = kilometres x c”, where c is a constant. We don’t know what this constant c is yet. The only other clues we have are some examples pairing kilometres with the correct value for miles. These are like real world observations used to test scientific theories - they’re examples of real world truth.
| Truth Example | Kilometres | Miles |
|---|---|---|
| 1 | 0 | 0 |
| 2 | 100 | 62.137 |
To work out that missing constant c just pluck a value at random and give it a try! Let’s try c = 0.5 and see what happens.
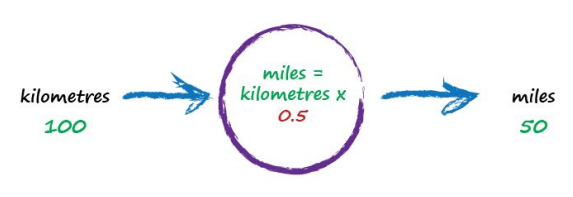
Here we have miles = kilometres x c, where kilometres is 100 and c is our current guess at 0.5. That gives 50 miles. Okay. That’s not bad at all given we chose c = 0.5 at random! But we know it’s not exactly right because our truth example number 2 tells us the answer should be 62.137. We’re wrong by 12.137. That’s the error, the difference between our calculated answer and the actual truth from our list of examples. That is,
error = truth $\times$ calculated = 62.137 $\times$ 50 = 12.137
Rashid, Tariq. Make Your Own Neural Network (Page 14). . Kindle Edition.
def km2miles(km,c):
value = km*c
return(value)
x=100
c=0.5
y=km2miles(x,c)
print(x, 'kilometers is estimated to be ',y,' miles')

So what next? We know we’re wrong, and by how much. Instead of being a reason to despair, we use this error to guide a second, better, guess at c. Look at that error again. We were short by 12.137. Because the formula for converting kilometres to miles is linear, miles = kilometres x c, we know that increasing c will increase the output. Let’s nudge c up from 0.5 to 0.6 and see what happens.
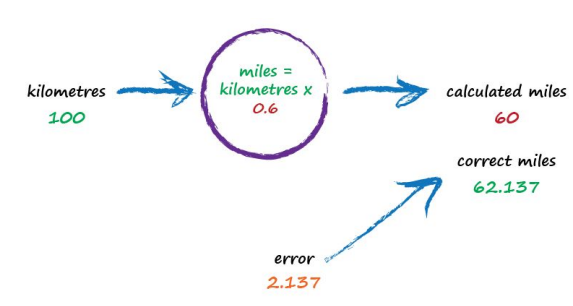
With c now set to 0.6, we get miles = kilometres x c = 100 x 0.6 = 60. That’s better than the previous answer of 50. We’re clearly making progress! Now the error is a much smaller 2.137. It might even be an error we’re happy to live with.
x=100
c=0.6
y=km2miles(x,c)
print(x, 'kilometers is estimated to be ',y,' miles')
The important point here is that we used the error to guide how we nudged the value of c. We wanted to increase the output from 50 so we increased c a little bit. Rather than try to use algebra to work out the exact amount c needs to change, let’s continue with this approach of refining c. If you’re not convinced, and think it’s easy enough to work out the exact answer, remember that many more interesting problems won’t have simple mathematical formulae relating the output and input. That’s why we use more sophisticated "machine learning" methods. Let’s do this again. The output of 60 is still too small. Let’s nudge the value of c up again from 0.6 to 0.7.
Rashid, Tariq. Make Your Own Neural Network (Page 16). . Kindle Edition.
x=100
c=0.7
y=km2miles(x,c)
print(x, 'kilometers is estimated to be ',y,' miles')
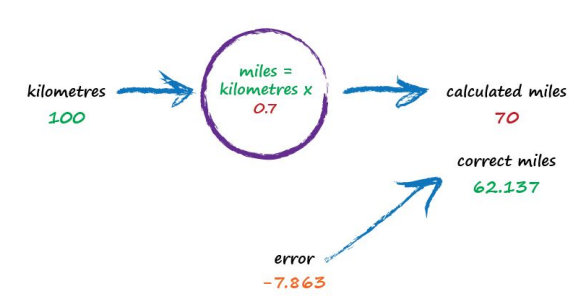
Oh no! We’ve gone too far and overshot the known correct answer. Our previous error was 2.137 but now it’s -7.863. The minus sign simply says we overshot rather than undershot, remember the error is (correct value - calculated value). Ok so c = 0.6 was way better than c = 0.7. We could be happy with the small error from c = 0.6 and end this exercise now. But let’s go on for just a bit longer.
Let's split the difference from our last guess - we still have overshot, but not as much (-2.8629).
Split again to c=0.625, and overshoot is only (-0.3629) (we could sucessively split the c values until we are close enough. The method just illustrated is called bisection, and the important point is that we avoided any mathematics other than bigger/smaller and multiplication and subtraction; hence just arithmetic.)
That’s much much better than before. We have an output value of 62.5 which is only wrong by 0.3629 from the correct 62.137. So that last effort taught us that we should moderate how much we nudge the value of c. If the outputs are getting close to the correct answer - that is, the error is getting smaller - then don’t nudge the constant so much. That way we avoid overshooting the right value, like we did earlier. Again without getting too distracted by exact ways of working out c, and to remain focussed on this idea of successively refining it, we could suggest that the correction is a fraction of the error. That’s intuitively right - a big error means a bigger correction is needed, and a tiny error means we need the teeniest of nudges to c. What we’ve just done, believe it or not, is walked through the very core process of learning in a neural network - we’ve trained the machine to get better and better at giving the right answer. It is worth pausing to reflect on that - we’ve not solved a problem exactly in one step. Instead, we’ve taken a very different approach by trying an answer and improving it repeatedly. Some use the term iterative and it means repeatedly improving an answer bit by bit.
x=100
c=0.65
y=km2miles(x,c)
print(x, 'kilometers is estimated to be ',y,' miles')
print(62.137-62.5)
x=100
c=0.625
y=km2miles(x,c)
print(x, 'kilometers is estimated to be ',y,' miles')
Classification¶
We called the above simple machine a predictor, because it takes an input and makes a prediction of what the output should be. We refined that prediction by adjusting an internal parameter, informed by the error we saw when comparing with a known-true example.
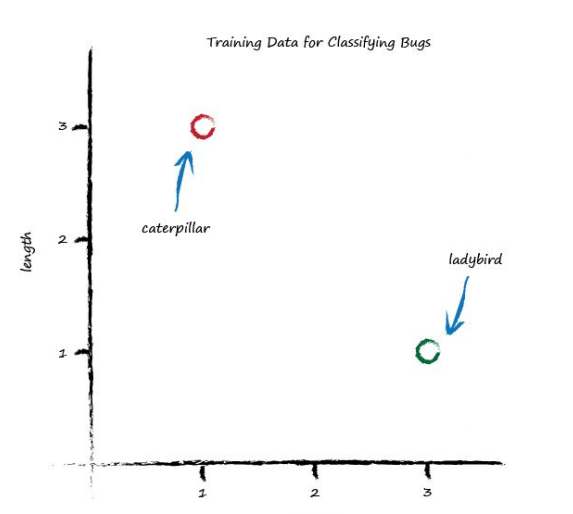
Now look at the following graph showing the measured widths and lengths of garden bugs.
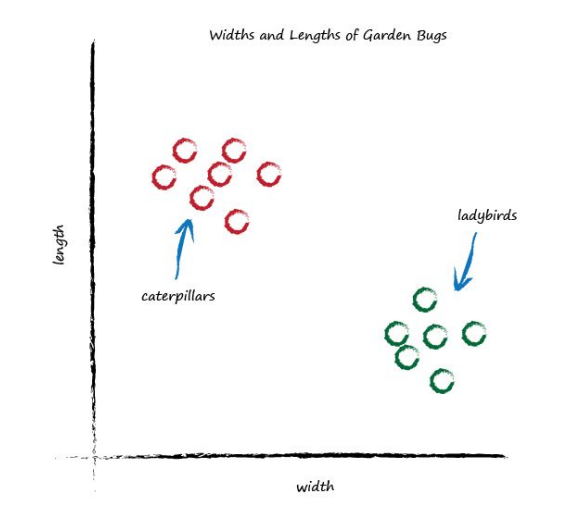
You can clearly see two groups. The caterpillars are thin and long, and the ladybirds are wide and short. Remember the predictor that tried to work out the correct number of miles given kilometres? That predictor had an adjustable linear function at it’s heart. Remember, linear functions give straight lines when you plot their output against input. The adjustable parameter c changed the slope of that straight line.
Rashid, Tariq. Make Your Own Neural Network (Page 19). . Kindle Edition.
# plot the predictor machine here
What happens if we place a straight line over that plot?
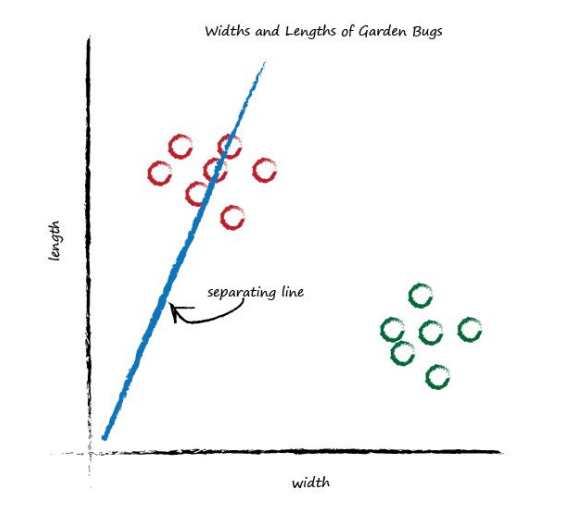
We can’t use the line in the same way we did before - to convert one number (kilometres) into another (miles), but perhaps we can use the line to separate different kinds of things. In the plot above, if the line was dividing the caterpillars from the ladybirds, then it could be used to classify an unknown bug based on its measurements. The line above doesn’t do this yet because half the caterpillars are on the same side of the dividing line as the ladybirds. Let’s try a different line, by adjusting the slope again, and see what happens.
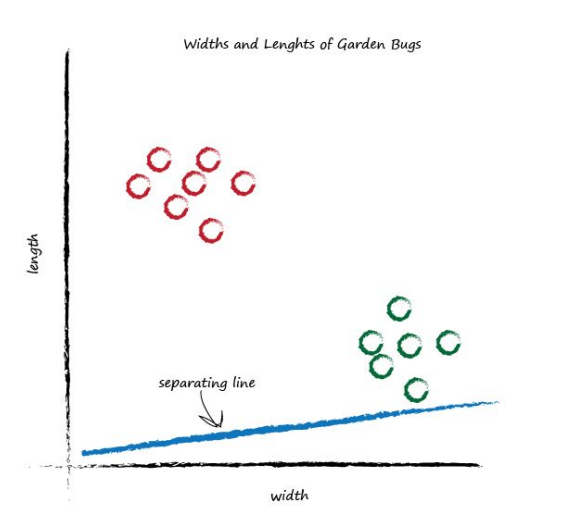
This time the line is even less useful! It doesn’t separate the two kinds of bugs at all. Let’s have another go:
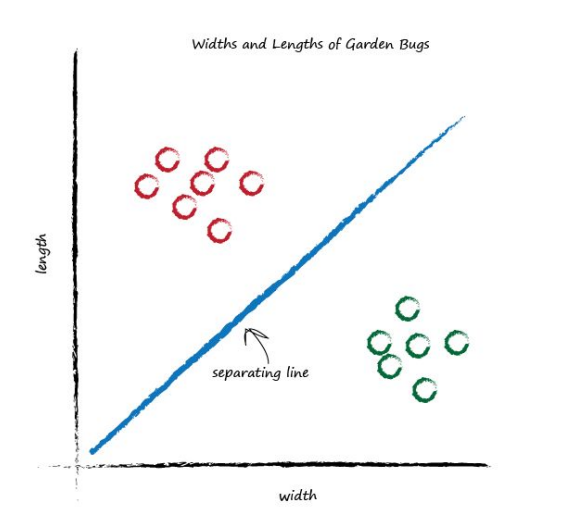
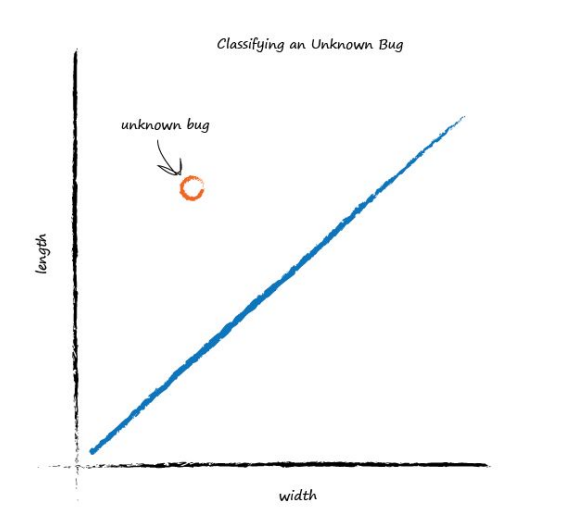
That’s much better! This line neatly separates caterpillars from ladybirds. We can now use this line as a classifier of bugs. We are assuming that there are no other kinds of bugs that we haven’t seen - but that’s ok for now, we’re simply trying to illustrate the idea of a simple classifier. Imagine next time our computer used a robot arm to pick up a new bug and measured its width and height, it could then use the above line to classify it correctly as a caterpillar or a ladybird. Look at the following plot, you can see the unknown bug is a caterpillar because it lies above the line. This classification is simple but pretty powerful already!
We’ve seen how a linear function inside our simple predictors can be used to classify previously unseen data. But we’ve skipped over a crucial element. How do we get the right slope? How do we improve a line we know isn’t a good divider between the two kinds of bugs? The answer to that is again at the very heart of how machines learn, and we’ll look at this next.
Training A Simple Classifier¶
We want to train our linear classifier to correctly classify bugs as ladybirds or caterpillars. We saw above this is simply about refining the slope of the dividing line that separates the two groups of points on a plot of big width and height.
How do we do this? We need some examples to learn from. The following table shows two examples, just to keep this exercise simple.
| Example | Width | Length | Bug |
|---|---|---|---|
| 1 | 3.0 | 1.0 | ladybird |
| 2 | 1.0 | 3.0 | caterpillar |
We have an example of a bug which has width 3.0 and length 1.0, which we know is a ladybird. We also have an example of a bug which is longer at 3.0 and thinner at 1.0, which is a caterpillar. This is a set of examples which we declare to be the truth.
It is these examples which will help refine the slope of the classifier function. Examples of truth used to teach a predictor or a classifier are called the training data. Let’s plot these two training data examples. Visualising data is often very helpful to get a better understand of it, a feel for it, which isn’t easy to get just by looking at a list or table of numbers.
Let’s start with a random dividing line, just to get started somewhere. Looking back at our miles to kilometre predictor, we had a linear function whose parameter we adjusted. We can do the same here, because the dividing line is a straight line: $y = Ax+b$
We’ve deliberately used the names $y$ and $x$ instead of length and width, because strictly speaking, the line is not a predictor here. It doesn’t convert width to length, like we previously converted miles to kilometres. Instead, it is a dividing line, a classifier. To keep the garden bug scenario as simple as possible we will choose a zero intercept $b=0$.
We saw before that the parameter $A$ controls the slope of the line. The larger $A$ is the larger the slope. Let’s go for $A$ is 0.25 to get started. The dividing line is $y = 0.25x$. Let’s plot this line on the same plot of training data to see what it looks like:
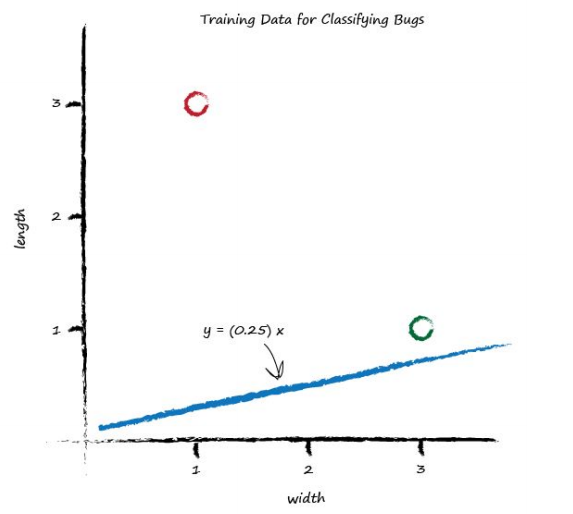
Well, we can see that the line $y = 0.25x$ isn’t a good classifier already without the need to do any calculations. The line doesn’t divide the two types of bug - We can’t say “if the bug is above the line then it is a caterpillar” because the ladybird is above the line too.
So intuitively we need to move the line up a bit. We’ll resist the temptation to do this by looking at the plot and drawing a suitable line. We want to see if we can find a repeatable recipe to do this, a series of computer instructions, which computer scientists call an algorithm.
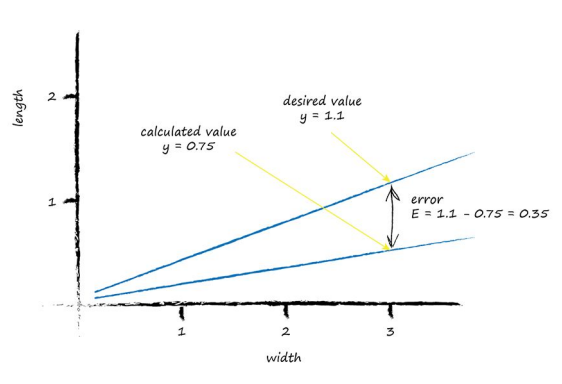
Let’s look at the first training example: the width is 3.0 and length is 1.0 for a ladybird. If we tested the $y = Ax$ function with this example where $x$ is 3.0, we’d get $y = (0.25) * (3.0) = 0.75$ The function, with the parameter $A$ set to the initial arbitrary chosen value of 0.25, is suggesting that for a bug of width 3.0, the length should be 0.75. We know that’s too small because the training data example tells us it must be a length of 1.0. So we have a difference, an error. Just as before, with the miles to kilometres predictor, we can use this error to inform how we adjust the parameter $A$. But let’s think about what $y$ should be again. If $y$ was 1.0 then the line goes right through the point where the ladybird sits at $(x,y) = (3.0, 1.0)$. It’s a subtle point but we don’t actually want that. We want the line to go above that point. Why? Because we want all the ladybird points to be below the line, not on it. The line needs to be a dividing line between ladybirds and caterpillars, not a predictor of a bug’s length given its width. So let’s try to aim for $y = 1.1$ when $x = 3.0$. It’s just a small number above 1.0, We could have chosen 1.2, or even 1.3, but we don’t want a larger number like 10 or 100 because that would make it more likely that the line goes above both ladybirds and caterpillars, resulting in a separator that wasn’t useful at all. So the desired target is 1.1, and the error E is
error = (desired target actual output)
Which is, $E = 1.1 \times 0.75 = 0.35$
Let’s examine the error, the desired target and the calculated value visually.
Now, what do we do with this E to guide us to a better refined parameter $A$?
We want to use the error in $y$, which we call E, to inform the required change in parameter $A$. To do this we need to know how the two are related. How is $A$ related to E?
If we know this, then we can understand how changing one affects the other (correlation anyone?).
Let’s start with the linear function for the classifier: $y = Ax$ We know that for initial guesses of $A$ this gives the wrong answer for $y$, which should be the value given by the training data. Let’s call the correct desired value, $t$ for target value. To get that value $t$, we need to adjust $A$ by a small amount; $ t = (A + \Delta A)x$ Let’s picture this to make it easier to understand. You can see the new slope $(A + \Delta A)$.
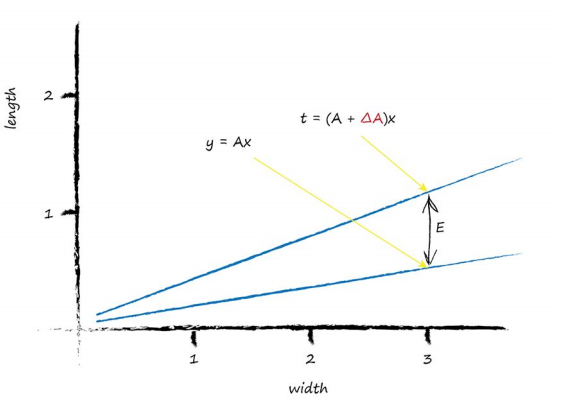
Remember the error E was the difference between the desired correct value and the one we calculate based on our current guess for $A$. That is, E was $t - y$ (Kind of smells like a residual!);
$$ t - y = (A + \Delta A)x - Ax$$Expanding out the terms and simplifying:
$$ \textbf{E} = t - y = Ax + (\Delta A)x Ax E = (\Delta A)x $$That’s remarkable! The error E is related to $\Delta A$ in a very simple way.
We wanted to know how much to adjust $A$ by to improve the slope of the line so it is a better classifier, being informed by the error E. To do this we simply re-arrange that last equation: $\Delta A = \textbf{E}/ x$ That’s the magic expression we’ve been looking for. We can use the error E to refine the slope $A$ of the classifying line by an amount $\Delta A$.
Let’s update that initial slope. The error was 0.35 and the $x$ was 3.0. That gives $\Delta A = \textbf{E}/ x$ as 0.35/ 3.0 = 0.1167. That means we need to change the current $A = 0.25$ by $0.1167$. That means the new improved value for $A$ is (A + ΔA) which is 0.25 + 0.1167 = 0.3667. As it happens, the calculated value of $y$ with this new $A$ is 1.1 as you’d expect - it’s the desired target value.
Now we have a method for refining that parameter $A$, informed by the current error. Now we’re done with one training example, let’s learn from the next one. Here we have a known true pairing of $x$ = 1.0 and $y$ = 3.0. Let’s see what happens when we put $x$ = 1.0 into the linear function which is now using the updated $A$ = 0.3667. We get $y$ = 0.3667 * 1.0 = 0.3667. That’s not very close to the training example with $y$ = 3.0 at all.
Using the same reasoning as before that we want the line to not cross the training data but instead be just above or below it, we can set the desired target value at 2.9. This way the training example of a caterpillar is just above the line, not on it. The error E is (2.9 0.3667) = 2.5333. That’s a bigger error than before, but if you think about it, all we’ve had so far for the linear function to learn from is a single training example, which clearly biases the line towards that single example.
Let’s update the $A$ again, just like we did before. The $\Delta A$ is $\textbf{E}/x$ which is 2.5333/ 1.0 = 2.5333. That means the even newer $A$ is 0.3667 + 2.5333 = 2.9. That means for $x = 1.0$ the function gives 2.9 as the answer, which is what the desired value was.
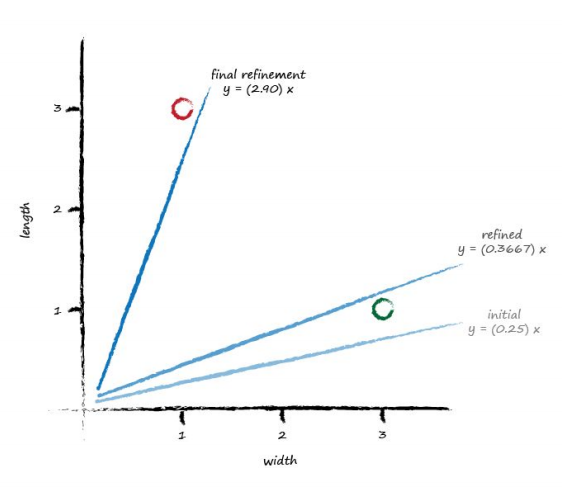
The plot shows the initial line, the line updated after learning from the first training example, and the final line after learning from the second training example.
Looking at that plot, we don’t seem to have improved the slope in the way we had hoped. It hasn’t divided neatly the region between ladybirds and caterpillars. The line updates to give each desired value for y. If we keep doing this, updating for each training data example, all we get is that the final update simply matches the last training example closely. We might as well have not bothered with all previous training examples. In effect we are throwing away any learning that previous training examples might gives us and just learning from the last one. How do we fix this?
Easy! And this is an important idea in machine learning.We moderate the updates. That is, we calm them down a bit. Instead of jumping enthusiastically to each new $A$, we take a fraction of the change $\Delta A$, not all of it. This way we move in the direction that the training example suggests, but do so slightly cautiously, keeping some of the previous value which was arrived at through potentially many previous training iterations. We saw this idea of moderating our refinements before - with the simpler miles to kilometres predictor, where we nudged the parameter c as a fraction of the actual error.
This moderation, has another very powerful and useful side effect. When the training data itself can’t be trusted to be perfectly true, and contains errors or noise, both of which are normal in real world measurements, the moderation can dampen the impact of those errors or noise. It smooths them out. Ok let’s rerun that again, but this time we’ll add a moderation into the update formula: $\Delta A = L (E/ x)$
The moderating factor is often called a learning rate, and we’ve called it $L$. Let’s pick $L$ = 0.5 as a reasonable fraction just to get started. It simply means we only update half as much as would have done without moderation.
Running through that all again, we have an initial $A$ = 0.25. The first training example gives us y = 0.25 3.0 = 0.75. A desired value of 1.1 gives us an error of 0.35. The $\Delta A = L (E/ x)$ = 0.5 0.35/ 3.0 = 0.0583. The updated $A$ is 0.25 + 0.0583 = 0.3083.
Trying out this new A on the training example at $x$ = 3.0 gives y = 0.3083 * 3.0 = 0.9250. The line now falls on the wrong side of the training example because it is below 1.1 but it’s not a bad result if you consider it a first refinement step of many to come. It did move in the right direction away from the initial line.
Let’s press on to the second training data example at $x$ = 1.0. Using $A$ = 0.3083 we have y = 0.3083 1.0 = 0.3083. The desired value was 2.9 so the error is (2.9 0.3083) = 2.5917. The $\Delta A = L (E/ x)$ = 0.5 * 2.5917/ 1.0 = 1.2958. The even newer $A$ is now 0.3083 + 1.2958 = 1.6042. Let’s visualise again the initial, improved and final line to see if moderating updates leads to a better dividing line between ladybird and caterpillar regions.
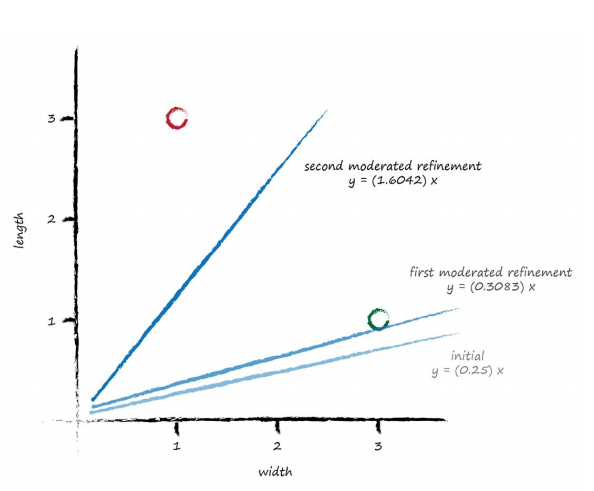
This is really good! Even with these two simple training examples, and a relatively simple update method using a moderating learning rate, we have very rapidly arrived at a good dividing line $y = Ax$ where $A$ is 1.6042. Let’s not diminish what we’ve achieved. We’ve achieved an automated method of learning to classify from examples that is remarkably effective given the simplicity of the approach.
Multiple Classifiers (future revisions)¶
Neuron Analog (future revisions)¶
- threshold
- step-function
- logistic function
- computational linear algebra
Classifiers in Python (future revisions)¶
- KNN Nearest Neighbor (use concrete database as example, solids as homework)
- ANN Artifical Neural Network (use minst database as example, something from tensorflow as homework)
- Clustering(K means, heriarchial (random forests))
- SVM
- PCA (? how is this machine learning we did this in the 1970s?)
References¶
Rashid, Tariq. Make Your Own Neural Network. . Kindle Edition.